von Erhard Schemainda
Die Version 1.0 der Highspeed-Controller Platine
Inhalt
Die ScopeClock von Sascha Ittner aus Jogis Röhrenbude ist sicher ein interessantes Projekt. Nicht um eine weitere Variante einer Gebrauchsuhr herzustellen, sondern weil hier moderne Technik mit Röhrentechnik miteinander verbunden werden. Dies macht den besonderen Reiz dieses Projektes aus. Für diese Arbeit gebührt Sascha ein großer Dank. Seine Arbeit animierte auch mich, da auch bei mir seit über 20 Jahren eine kleine Oszillographenröhre (2BP1) samt zugehörigem HV-Trafo und HV-Platine herumlagen, diese zu neuem Leben zu erwecken. Der sehr klare und übersichtliche Aufbau der Schaltung macht eine Anpassung an andere Röhrenschaltungen leicht und garantiert eine hohe Nachbausicherheit.
Im Forum waren jedoch von einigen Nachbauern mehr oder weniger enttäuschte Stimmen zu vernehmen, die das 25 Hz Flimmern des Zifferblattes als störend empfanden. Dies reizte mich, mich mit der ScopeClock näher zu befassen. Nicht um etwas besser zu machen war meine Intention, denn das Bessere ist des Guten Feind, sondern einfach die Faszination dieser Technik.
Die Verfolgung des Bildaufbaues am Oszilloskop zeigte, daß für das Schreiben des Zifferblattes ca. 33 - 35 ms benötigt werden. D.h., daß nur nach jedem 2. externen Interrupt das Zifferblatt von Neuem geschrieben wird. Dies ergibt eben das 25 Hz Flimmern, das um so deutlicher wahrnehmbar wird, je heller man den Strahl aussteuert. Um hier Abhilfe zu schaffen, müßte man das Schreiben des Zifferblattes so verkürzen, daß es zwischen zwei externen Interrupts, also innerhalb von 20 ms vollständig abgeschlossen wird. Damit käme man dann auf eine Bildfolgefrequenz von 50 Hz, entsprechend der noch üblichen Fernseh-Norm.
Um dieses Ziel zu erreichen bieten sich grundsätzlich zwei Lösungswege an:
Der erste Weg bringt sicherlich eine deutliche Verschlechterung der Darstellungsqualität mit sich und ist in der Realisierung schwer abschätzbar und zeitaufwendig. Ich habe mich daher für den zweiten Weg entschlossen, da er mir einfacher und überschaubarer erschien.
Die Mindestanforderungen, die ein geeigneter Prozessor erfüllen sollte, waren:
Nach relativ kurzer Recherche stieß ich bei meiner Suche auf den DS89C420 von Dallas-Maxim, der alle Bedingungen erfüllte bzw. die Forderung nach höherer Geschwindigkeit noch reichlich übertraf. Mit quasi der 12-fachen Taktgeschwindigkeit gegenüber dem 4051 ist er etwa 10 mal schneller als dieser. Damit hatte ich meine Wahl getroffen, ohne noch weitere Nachforschungen anzustellen. Ich habe mich für die 40pol Ausführung des DS89C420 entschieden, mit der genauen Bezeichnung: DS89C420-MCL. Zusätzlich bietet dieser Prozessor, u.a. mit 16K Programmspeicher (Flash) und zwei weiteren Ports, genügend Reserven für zusätzliche Erweiterungen (z.B.: Datumsanzeige, Weckeinrichtung, ... wie dies im Forum schon diskutiert wurde). Auch eine Portierung des Programms nach "C" wäre denkbar.
Den Ersatz des 4051 habe ich so geplant, daß keine wesentlichen änderungen an der ScopeClock-Platine erforderlich werden. Der neue Prozessor soll dazu auf eine Zusatzplatine aufgebaut und über ein 20-pol. Flachbandkabel mit DIL-Stecker an die Fassung des 4051 angeschlossen werden.
Die Abbildung zeigt den DS89C420 in der Minimalbeschaltung, wie sie in den Applikationen von Maxim-Dallas verwendet wird. Als Vorlage diente die Schaltung des Highspeed-Controller-Boards von Elektor, das in den Ausgaben Juni und September 2002 veröffentlicht worden ist. Jedem der sich etwas näher mit dem 89C420 beschäftigen will, wird die Lektüre dieser beiden Artikel empfohlen. Man kann diese gegen eine geringe Gebühr vom Elektor-Verlag beziehen.
Der 89C420 kennt zwei Betriebszustände. Den Programmablauf-Modus und den Monitor-Modus. Im Programmablauf-Modus wird das im Programmspeicher befindliche Programm ausgeführt. Im Monitor-Modus ist das integrierte Monitorprogramm aktiv und kommuniziert über die RS232-Schnittstelle mit einem angeschlossenen PC. In diesem Modus wird u.a. das Laden eines Programms in den Programmspeicher (Brennen) durchgeführt. Die Schaltung in den gewünschten Modus erfolgt über die Pins EA (31), PSEN (29) und Reset (9).
|
Modus |
Reset |
EA |
PSEN |
| Programmablauf | 0 | 1 | 1 |
| Monitor | 1 | 0 | 0 |
Die Umschaltung zwischen den Modi erfolgt mittels des DTR Signals vom PC über die RS232-Schnittstelle, wobei das IC2 die erforderlichen Signallevel an den Pins erzeugt. Mit dem Jumper JP1 unterbricht man die DTR-Verbindung. Dies ist nur eine Vorsichtsmaßnahme, wenn man die ScopeClock bei angeschlossenem PC laufen läßt. Man verhindert damit ein ungewolltes Schalten in den Monitor-Modus.
Der 89C420 Prozessor wird, wie der 89C4051, ebenfalls mit einer Taktfrequenz von 24 MHz betrieben, nur daß dabei mit jedem Takt ein Befehlszyklus ausgeführt wird. Der 4051 benötigt dagegen 12 Takte für einen Zyklus. Die Bürdekapazitäten des Quarzes (Q1) sind unkritisch und können 22 - 27 pF betragen. Es wird empfohlen, ein Grundwellenquarz zu verwenden. Man erspart sich dadurch eventuell einige Schwierigkeiten mit dem Anschwingen. Die Bauteile L1 und C3 werden nur bei Oberwellenquarzen benötigt. Es kann auch das Wertepaare L1 = 12µH und C3 = 33pF verwendet werden.
Die integrierte Stromversorgung wird nur benötigt, wenn der Highspeed-Controller nicht an der Scopeclock-Platine angeschlossen ist. Dies könnte der Fall sein, wenn man den Prozessor separat von der ScopeClock programmieren will. D1 dient als Schutz bei falscher Polung der Eingangsspannung.
Für eventuelle Funktionserweiterungen ist der Pin P3.6 (beim 4051 nicht vorhanden) als Taster/Schalter (JP2) geschaltet (geschlossen = 0, geöffnet = 1). Ebenso ist der gesamte Port P0 an K4 zugänglich, zusätzlich +5V und Gnd.
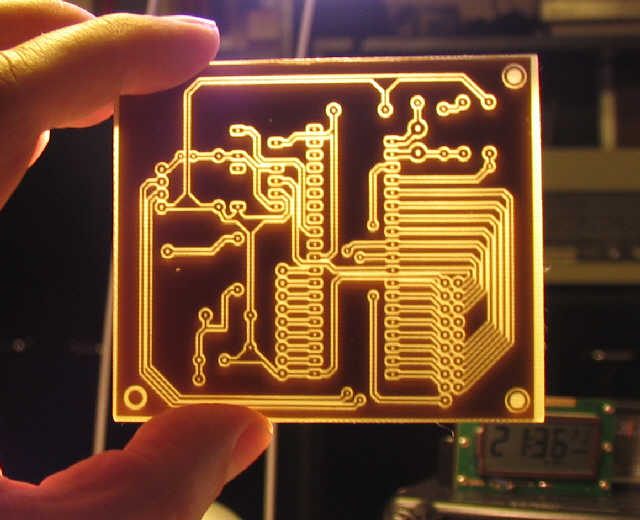
Der Aufbau der Schaltung erfolgt auf einer 82 x 72 mm großen einseitigen Leiterplatte. Leider ließen sich Brücken auf der Bestückungsseite nicht ganz vermeiden. Drei Brücken kreuzen die Leiterbahnen unterhalb des Prozessors. Sie sollten verlegt werden, bevor der 40pol-Sockel eingelötet wird. Zwei kurze Brücken dienen der Verbindung isolierter Masseflächen zu der Gesamtmasse. Der Abstand von Leiterbahnen und Lötaugen zu der umgebenden Massefläche ist sehr gering. Daher muß beim Lötvorgang sorgfältig darauf geachtet werden, daß sich keine Lötbrücken bilden. Es ist anzuraten, mit einem spitzen Lötkolben zu arbeiten und den Lötkolben während des Lötvorganges möglichst senkrecht auf die Kupferfläche anzusetzen. Die Seite der Lötspitze darf auf keinen Fall die benachbarte Massefläche berühren. Diese Vorsichtsmaßnahmen erübrigen sich natürlich beim Verlöten der Masseverbindungen.
Die gelben Leiterbahnen bezeichnen die Drahtbrücken auf der Bestückungsseite
Nach dem Herstellen einer überschaubaren Gruppe von Lötstellen, diese mit dem Ohmmeter/Durchgangsprüfer auf Masseschluß überprüfen. Sollten sich Lötbrücken gebildet haben, diese vollständig mit Entlötlitze absaugen, den Isolationskanal von Lötzinntröpfchen säubern und erneut ansetzen.
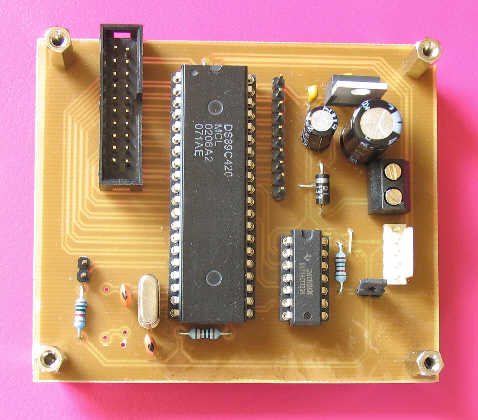
Die fertig bestückte HS-Controller Platine
Die Stückliste: Bezeichnung Wert Bemerkung Die Verbindung zwischen der Highspeed-Controller Platine
und der ScopeClock-Platine wird mit einem Stück 20pol Flachbandkabel
hergestellt, das an einem Ende einen 20pol Pfostensteckverbinder und auf der
anderen Seite einen Dual-Inline Steckverbinder eingeschnitten bekommt. Der
Dual-Inline Stecker wird anstelle des 4051 auf die ScopeClock Platine gesteckt
der Pfostensteckverbinder kommt in den Wannenstecker K2 auf der
HS-Controller Platine.
Das Verbindungskabel, der Stecker und Verbinder
sind wie abgebildet in das Kabel zu schneiden Schaltung und Platine des HS-Controllers sind mit den
Design-Produkten der Firma ABACOM "sPlan"
und "Sprint Layout" erstellt. Die mit diesen Werkzeugen erzeugten Dateien sind
zusammen mit dem Quellprogramm und der Hex-Datei in dem Verzeichnis \hscontrl\
enthalten, das dem ScopeClock-Package von Sascha hinzugefügt wurde. Das
Platinen-Layout sowie die Schaltung können mit den bei ABACOM kostenlos
herunterzuladenden Viewer angesehen und maßstabsgerecht ausgedruckt werden.
Zum Programmieren muß der HS-Controller an einen PC
angeschlossen werden. Dies erfolgt über den 5-poligen RS232-Anschluß K1. Da an
diesem Anschluß jedoch TTL-Pegel erforderlich sind, wird ein RS232 - Konverter
erforderlich, der die V.24-Pegel des PC auf TTL-Pegel bringt. Der Konverter wurde
nicht mit auf die Controller-Platine gesetzt, da er nur für das Laden des ScopeClock - Programms erforderlich ist und für den weiteren Betrieb der Uhr
keine Bedeutung hat. Darüber hinaus, wenn man mehrere 89C420 Boards besitzt, z.B.
noch ein Entwicklungsboard, braucht man den RS232-Konverter nur einmal
aufzubauen.
Die Schaltung ist standardmäßig mit dem MAX232
bestückt, jedoch mit einer Ausnahme. Das DTR-Signal wird "seitenverkehrt"
angeschlossen, d.h.: die V.24 - Seite geht an den Controller und die TTL - Seite
an den PC. Weitere Erläuterungen hierzu sind in dem bereits zitierten
Elektor-Artikel nachzulesen. Bausätze und Platinen für RS232 - Konverter gibt es
reichlich, so daß auf einen Platinenentwurf an dieser Stelle verzichtet wird. In der folgenden Abbildung soll die erforderliche änderung für das DTR-Signal anhand des ELV-Bausatzes gezeigt werden (zu
beziehen über
ELV Elektronik AG).
Die Verbindung der RS232-Platine zum RS232-Anschluß auf der
HS-Controller-Platine ist wie folgt vorzunehmen :
Grundsätzlich läuft die ScopeClock mit
angeschlossenen HS-Controller auch mit dem unveränderten Originalprogramm. Die
Darstellung ist jedoch nicht sehr ansprechend. Das rührt daher, daß das ganze Ziffernblatt
jetzt in ca. 5 ms geschrieben wird. Das ist gegenüber der Originalbestückung mit
dem 4051 etwa die 7-fache Geschwindigkeit. Damit reicht die Bandbreite der X-, Y- und
Z-Verstärker nicht mehr aus, um ein sauberes Bild zu erzeugen. Die Folge davon
ist die Bildung von Schlieren, wenn der Strahl von einem Symbol zum anderen
springt. Die Vektoren werden nicht mehr vollständig ausgeschrieben, da die Rechteckpulse zu spitzen Dreieckspulsen
deformiert werden und ineinander verlaufen.
Es ist daher erforderlich, um den vorherigen Zustand wieder einigermaßen
herzustellen, den Bildaufbau gleichmäßig auf die zur Verfügung
stehende Zeit von 20 ms zu verteilen. Zwar dürfen die 20 ms nicht ganz erreicht
werden, da die Dauer des Bildaufbaues nicht konstant ist, sondern von der
Konstellation der Uhrzeit in der Ziffernanzeige abhängt. Die
Anzahl der zu schreibenden Punkte bzw. Vektoren der verschiedenen Ziffern ist
nämlich nicht konstant.
Um auf die erforderliche Verzögerung des Bildaufbaues zu
kommen, wurden im wesentlichen folgende zwei Programmänderungen durchgeführt:
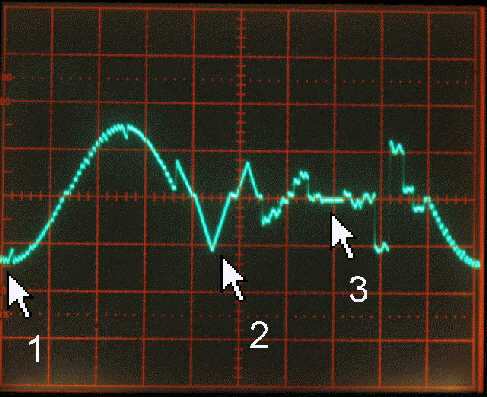
Das Ergebnis dieser änderungen zeigt die folgende
Abbildung, die den zeitlichen Verlauf beim Schreiben des Zifferblattes über 20
ms am Beispiel der X-Auslenkung der Scope-Röhre wiedergibt.
X-Achse - Zeitbasis 2 ms / Teilstrich
Die Kurve zeigt bei (1) das Schreiben der Teilstriche. Die
kleine Auslenkung wird durch den etwas längeren Strich bei der 9 und entgegengesetzt
auf dem Scheitelpunkt der Sinuskurve durch den entsprechenden Strich bei der 3
bewirkt. Das
Schreiben der Striche bei der 6 und der 12 ist nur durch einen etwas breiteren
Punkt beim Kreuzen der Mittellinie angedeutet (fast keine X-Ablenkung). Danach erfolgt das Zeichnen der
Zeiger (2). Die drei Zacken stellen, von links nach rechts, den Sekunden-, den
Minuten- und den Stundenzeiger dar. Die treppenförmige Kurve zeigt die
Zifferndarstellung der Uhrzeit und anschließend das Empfangssymbol. Damit ist
der logische Zyklus des Schreibens des Ziffernblattes abgeschlossen. Der kurze
waagrechte Strich auf der Mittellinie (3) wird durch die Wartezeit (ca. 200 - 300
µs) auf den nächsten Interrupt gebildet. Dann beginnt der Schreibvorgang von Neuem mit
dem Schreiben der 12, 6, 3 und 9, gefolgt von den Doppelpunkten in der
Zifferndarstellung. Anschließend beginnt wieder die Sinuskurve, die das
Schreiben der Teilstriche zeigt, begonnen mit dem etwas längeren Strich bei der 12.
Das geänderte Programm ist in dem
vorhergehend referenziertem Download-Package enthalten. In übereinstimmung mit den
Bestimmungen der GNU General Public License (GPL) wird es zusammen mit der originalen
Programm-Version der ScopeClock veröffentlicht. Die nachstehend aufgeführten
Dateien sind in dem zugefügten Verzeichnis \hscontrl\ enthalten:
DS89C420_Platine_MP.lay
Platinen-Layout
Zur einfacheren Handhabung bei der Assemblierung wurden die
Vektor-Daten in die Programmquelle eingebunden (Das Include wird in Paul's
Version des AS31 - Assemblers leider nicht unterstützt). Wer das Quellprogramm
neu assemblieren möchte, kann dies mit dem Befehl "as31 -l scopeclk.asm" tun.
Das Ergebnis ist die ladefähige .hex - Datei sowie ein Programm-Listing.
Zum Laden des Programms muß der HS-Controller über das RS232-Interface an einen
PC sowie an eine Spannungsquelle angeschlossen werden. Letzteres kann über die
Flachkabel-Verbindung zur ScopeClock-Platine oder ein Steckernetzteil erfolgen.
Der Jumper JP1 muß in jedem Fall gesteckt sein. Das Programm wird im Intel-Format an den Prozessor gesendet. Hierfür
sind zwar
grundsätzlich die meisten Terminalprogramme geeignet, bequemer geht es aber mit dem
speziellen Programm MTK2 von Dallas-Maxim, das über eine graphische Oberfläche die erforderlichen Monitorbefehle
und Daten
per Maus-Bedienung an den Prozessor schickt.
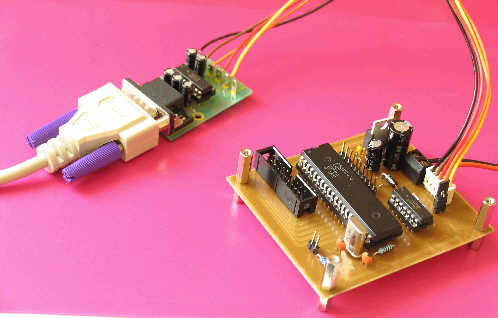
Der HS-Controller mit RS232-Interface und externer
Stromversorgung
Das Programm MTK2 kann von der FTP-Site von Maxim-Dallas heruntergeladen werden.
ftp://ftp.dalsemi.com/pub/microcontroller/dev_tool_software/mtk/mtkinstall-2_3_00.exe
Download MTK2
Nach der Standard-Installation des Programms kann es über das Icon auf dem Desktop
gestartet werden. Es meldet sich zunächst mit einem Pop-Up-Menue zur Auswahl des
Prozessors. Nach der Auswahl des DS89C420 erscheint ein übliches
Programmfenster, wie wir es von Windows gewohnt sind. Zunächst ist die serielle
Schnittstelle zu konfigurieren.
über Options > Configure Serial Port
öffnet sich ein kleines Fenster, in dem man den Com-Port
(Port) und die übertragungsgeschwindigkeit (Speed) wählt. Bei der Wahl der
übertragungsgeschwindigkeit ist man nicht ganz frei, denn der Monitor macht ein
sogenanntes Autobaud und versucht die Geschwindigkeit durch Probieren mit
verschiedenen Zeitkonstanten selbst herauszufinden. Leider passen die meisten
dieser Konstanten nicht zu der Taktgeschwindigkeit von 24 MHz. 9600 Baud haben
sich aber bewährt und die sollte man auswählen. Mit
Target > Open COMx at 9600 baud
öffnet man die serielle Schnittstelle, und mit
Target > Connect to Loader
gelangt man in den Monitor-Modus.
Der Prozessor begrüßt einen jetzt (falls alles korrekt
gelaufen ist) mit einer Nachricht, wie auf nachfolgendem Screenshot zu sehen
ist.
Nun ist der Monitor bereit, das ScopeClock-Programm zu laden.
Hierzu geht man wieder in die Menueleiste und selektiert:
File > Load Flash
R1
10k
Metallschicht
R2
10k
Metallschicht
R3
10k
Metallschicht
C1
27p
Keramik
C2
27p
Keramik
C3
39p
Keramik
C4
470µ/25V
Elektrolyt
C5
100n
Vielschicht Keramik
C6
100n
Vielschicht Keramik
C7
47µ/16V
Elektrolyt
IC1
DS89C420-MCL
DIL 40pol
IC2
74HCT125
IC3
7805
TO220
D1
BY133, 1N400. o.ä.
Q1
24MHz
Quarz
L1
10µH
Festinduktivität
K1
5pol
Steckverbinder, gerade
K2
20pol
Wannenstecker, gerade
K3
2pol
RIA Anschlußklemme, RM 5mm
K4
10pol
Stifteleiste 1-reihig oder
Steckverbinder
JP1
2pol
Stifteleiste 1-reihig
JP2
2pol
Stifteleiste 1-reihig
40pol
IC-Fassung, gedreht
14pol
IC-Fassung, gedreht
20pol
Flachbandkabel, 15 - 20 cm
20pol
Steckverbinder, Dual-Inline
20pol
Pfostensteckverbinder

Das RS232-Interface
(sinngemäße Anschaltung bei anderen Ausführungen)
RS232-Platine
K1
ST1
+5V
ST2
Tx
ST3
DTR
ST4
Rx
ST6
Gnd
Programmänderungen
DS89C420_schaltung.spl Schaltung des HS-Controllers
ScopeClk.asm
Das angepaßte Quellprogramm
scopeclk.hex
Die ladefähige Version des Programms im Intel-Format
scopeclk.lst
Das Assembler-Listing des Quellprogramms
Die Flash-Programmierung
Es öffnet sich jetzt ein Open-Dialog mit dem man die Hex-Datei des ScopeClock-Programms (scopeclk.hex) auswählt. Nach Betätigung des <öffnen> - Buttons beginnt der Ladevorgang, der auf dem Monitorschirm protokolliert wird. Anschließend führt man auf gleiche Weise ein Verify durch, um sich die Richtigkeit des Ladevorganges bestätigen zu lassen.
Mit
File > Verify Flash
wird der Verify-Vorgang initiiert. Wenn alles richtig gelaufen ist, sollte der Monitorschirm wie folgt aussehen:
Damit ist der Prozessor programmiert und man kann nun das Programm MTK2 verlassen. Hierzu beendet man den Monitor-Modus und schließt die serielle Schnittstelle mit der Auswahl:
Target > Disconnect from Loader
Target > Close COMx
Anschließend kann man das Programm mit:
File > Exit
beenden.
Hatte man die ScopeClock-Platine mit der HS-Controller-Platine während des Programmiervorganges verbunden, wird nach der Ausführung von "Disconnect from Loader" ein Reset durchgeführt und die ScopeClock gestartet. Man sollte nun durch Ziehen des Jumpers JP1, das DTR-Signal des PC von der ScopeClock trennen, um Störungen zu vermeiden. Falls man den HS-Controller über die externe Stromversorgung angeschlossen hatte, trennt man diese und verbindet den HS-Controller mit der ScopeClock. Nach Einschalten der Betriebsspannung startet die ScopeClock nun in gewohnter Weise ohne Flimmern.
![]()
Die ScopeClock mit Highspeed-Controller "in action"
Wenn das HS-Controller Board auf Dauer mit der ScopeClock Platine verbunden bleiben soll, empfiehlt es sich, die Pull-Up Widerstände R4 und R5 zu entfernen oder einseitig auszulöten. Da sie parallel zu den internen Pull-Up Widerständen liegen, vergrößern sie unnötigerweise den Strom über die Pins P1.0 und P1.1. Beim DS89420 sind im Gegensatz zum AT89C4051 alle Pins des Ports 1 mit internen Pull-Up Widerständen versehen, so daß die externen ersatzlos entfallen können.
Mit der Reduzierung der Zeit für das Schreiben des Zifferblattes von etwa 35 ms auf 20 ms liegt die Schreibgeschwindigkeit mit dem HS-Controller Board um den Faktor 1,75 höher als bei der originalen ScopeClock. Um die Konturenschärfe des Ziffernblattes weiter zu erhöhen, wurde versucht, die Bandbreite, zunächst des Z-Verstärkers, zu verbessern. Auf Vorschlag von Gerd Reinhöfer wurde der Z-Verstärker niederohmiger gemacht (R47 = 4,7k; R48 = 1k) und in PSpice simuliert. Hier die Ergebnisse der Simulation:
Der Z-Verstärker in PSpice
Das Ergebnis mit der Originaldimensionierung (R47 = 47k; R48 = 10k)
Und hier mit der geänderten Dimensionierung (R47 = 4,2k; R48 = 1k)
Es war nicht die Absicht, für die Simulierung ein genaues Modell der Schaltung zu schaffen. Es sollte lediglich der Trend aufgezeigt werden, wenn man die Schaltung niederohmiger dimensioniert. Die Simulation wurde gewählt, da ohne Speicheroszilloskop sich der Kurvenverlauf an der Originaluhr nicht darstellen läßt. Es wurde eine Pulsfrequenz von 111 kHz (9 µs) mit einem Tastverhältnis von 1 : 2 zugrundegelegt. Das entspricht einer Auflösung beim Schreiben des Ziffernblattes von etwa 2200 Punkten oder genauer von 2200 Elementarvektoren (Bresenham-Vektoren), die der Wirklichkeit in etwa entsprechen könnte.
Wie die nachfolgenden Bilder zeigen, sind die Auswirkungen nicht dramatisch. Der größte Teil der Darstellungsoptimierung wurde bereits durch das Heruntersetzen der Schreibfrequenz erreicht, d.h., durch die kontinuierliche Dehnung des Schreibvorganges über die 20 ms. Während der Experimentierphase mit nicht optimaler Gesamtverzögerung, trat der Unterschied wesentlich deutlicher in Erscheinung.

Die Darstellung mit R47 = 47k; R48 = 10k

Die Darstellung mit R47 = 1k; R48 = 42k
Wie man sieht, wird die Schlierenbildung etwas mehr sichtbar. Dies rührt wohl daher, daß der Schreibvorgang abrupt aufhört und der Strahl zur nächsten Position schlagartig abgelenkt wird, während ohne die änderung, der Strahl schon in der Schreibphase schwächer (s. rechte Flanken in der PSpice-Darstellung) und sanfter zur nächsten Position verschoben wird. Will man diese änderung nachvollziehen, ist es nicht erforderlich die Widerstände R47, R48 auszulöten. Durch Parallelschalten von 4,7k und 1,2k erreicht man die Werte 4,2k und 1k. Es empfiehlt sich dann jedoch, dem T7 einen kleinen Kühlkörper zu gönnen.
Dieses Kapitel ist sicherlich noch nicht abgeschlossen und birgt genügend Potential für weitere Experimente, wie z.B. Versuche, auch die Bandbreite der X- und Y-Verstärker zu erhöhen.
06.11.2005 Aufgrund eines Hinweises von Herrn Günther Zöppel wurde die Zuordnungstabelle "RS232 Platine/K1" im Abschnitt "RS232-Interface" berichtigt. ST2 muß Tx und ST4 Rx zugeordnet werden.
Harry Dronkert meldete: "Connect zum PC wird nicht ausgeführt". Dies ist eine Folge der o.a. Vertauschung von Tx und Rx.
Sascha Ittner, ScopeClock mit D7-16 und ATMEL-Controller aus Jogis Röhrenbude
Dallas-Maxim, Datenblatt und Applikationen DS89C420
Elektor 6 und 9/2002, Highspeed-Controller-Board, Elektor-Verlag
ABACOM "sPlan" und "Sprint Layout"
ELV Elektronik AG, RS232 Interface
Dallas-Maxim, ftp://ftp.dalsemi.com/pub/microcontroller/dev_tool_software/mtk/mtkinstall-2_3_00.exe Download MTK2
Dallas-Maxim, DS89C420 Ultra High-Speed Microcontroller User's Guide
Stand: 16.11.2005